scipy.integrate.solve_ivpについて浅く掘る
scipy.integrate.solve_ivpの実装について簡単に見ていきます。 Solving Ordinary Differential Equations I [1]と実際のコード[2]を参考にしています。
設定
今回はLorenz方程式を使用します。
Deterministic Nonperiodic Flow
$ \begin{cases} \dot{x}=\sigma(y-x)\\ \dot{y}=rx-y-xz\\ \dot{x}=xy-bz \end{cases} $
パラメータは代表的な$\sigma=10,b=8/3,r=28$を使います。
, , =
= - * + *
= - * + * -
= * - *
return
今回は初期値を$(0.1, 0.1, 0.1)$とし、時間$t=0$から$t=40$で解いていきます。
使うライブラリは以下の通りです。
solve_ivp
scipy.integrate.solve_ivpを使って解いていきます。
方程式を解く際にscipy.integrate.odeintやscipy.integrate.odeを使っている例が多いですが、現在はOld APIに指定されています。
Integration and ODEs | Old API
対象の方程式、時間のスパン、初期値を与え、解きます。
=
計算結果はOdeResultというオブジェクトで返ってきます。これは結局dictみたいなものです。[*1]
軌道はyに格納されていて、次元×STEP数のnp.ndarrayです。
3次元プロットをすることで軌道を確認します。
, =
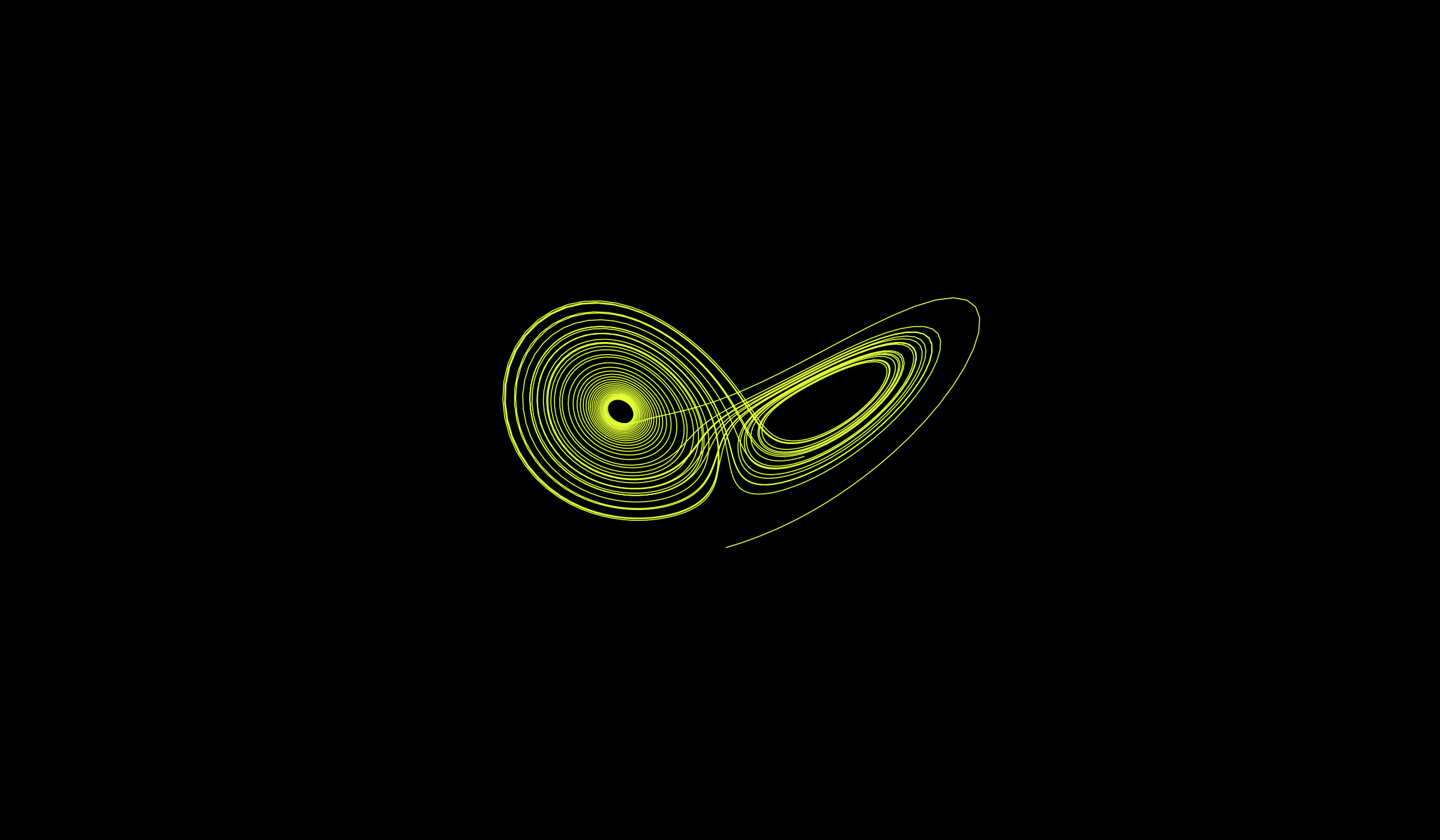
アトラクターを確認することができました。
method=
scipy.integrate.solve_ivpではOdeSolverを使用して計算を行なっています。
solverは引数methodで設定されます。デフォルトではRK45が採用されています。
RK45はEmbedded Runge-Kutta Formulasの一つで、刻み幅の自動調整が行われています。
刻み幅hの推移を見ることで調整しているかどうかを確認します。
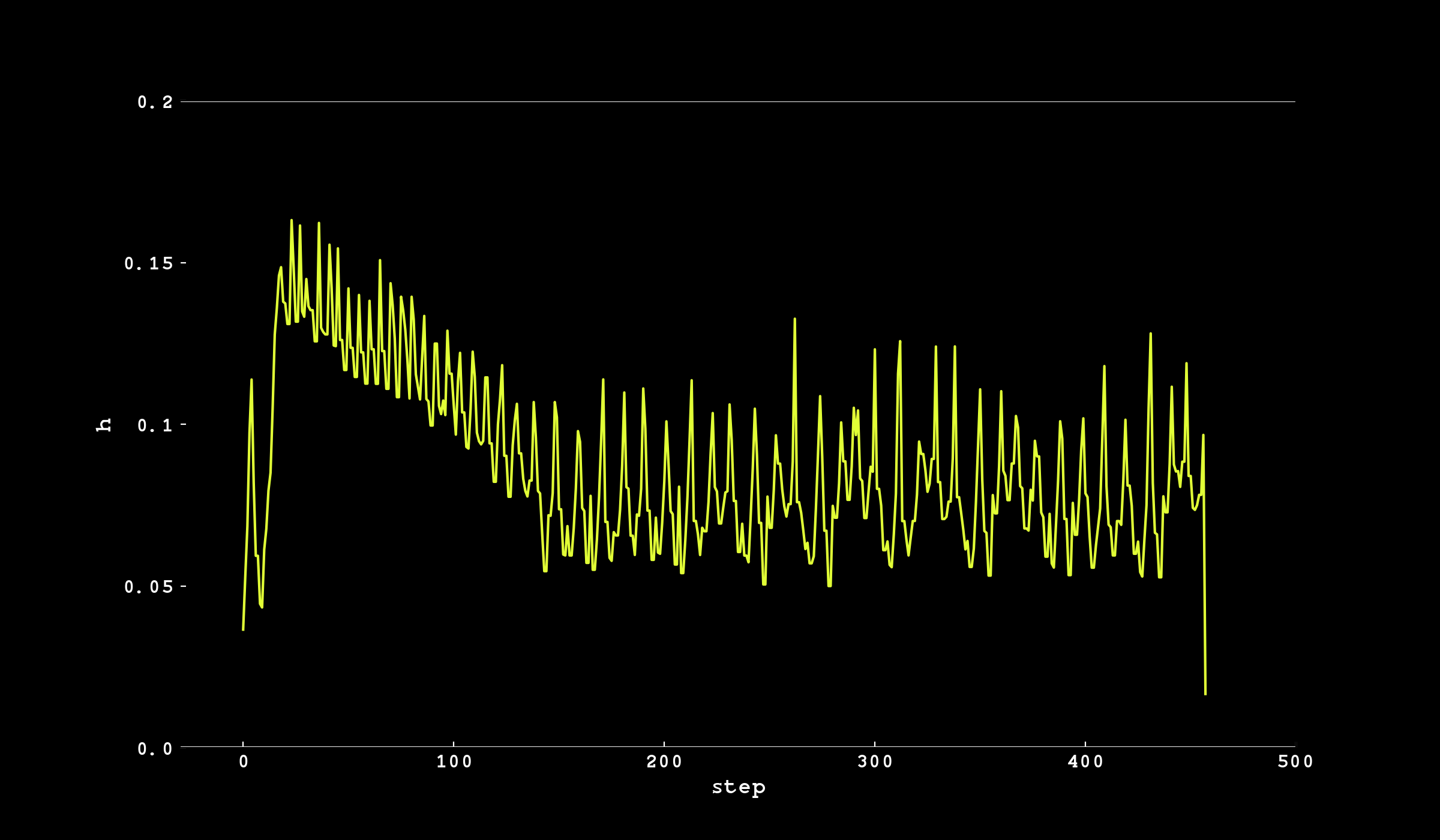
刻み幅の動的更新が確認できます。
Embedded Runge-Kutta
Embedded Runge-Kutta(埋め込みルンゲ・クッタ)では $p$ 次の $b$ と、 $\hat{p}$ 次( $\hat{p}=p-1 \ or \ \hat{p}=p+1$ )の $\hat{b}$ を利用して計算を行います。
Butcher tableauは以下のようになります。
$$$ \def\arraystretch{1.5} \begin{array}{c|c} 0 & & & \\ c_1 & a_{21} & & & \\ c_2 & a_{31} & a_{32} & & \\ \vdots & \vdots & \vdots & \ddots & & \\ c_s & a_{s1} & a_{s2} & \cdots & a_{s, s-1} & \\ \hline & b_1 & b_2 & \cdots & b_{s-1} & b_s \\ \hline \\ & \hat{b_1} & \hat{b_2} & \cdots & \hat{b_{s-1}} & \hat{b_s} \\ \end{array} $$$
$ k_s =f(t_0+c_sh, y_0+h(a_{s1}k_1+...+a_{s, s-1}k_{s-1})) $
$p$次の$y_1$を計算します。
$ y_1 = y_0 + h(b_1k_1+...+b_sk_s) $
$\hat{p}$次の$\hat{y}_1$を計算します。
$ \hat{y}_1 = y_0 + h(\hat{b}_1k_1+...+\hat{b}_sk_s) $
solve_ivpはこの差 $y_1 - \hat{y}_1$ を$sc_i$以下に保ちます。
$ |y_{1i}-\hat{y_{1i}}|\leq sc_i \\ sc_i=Atol_i + max(|y_{0i}|,|y_{1i}|) Rtol_i $
rtol=1e-3, atol=1e-6とデフォルトで設定されています。
# scipy/integrate/_ivp/rk.py
...
...
= + *
...
$Rtol$と$Atol$を使用して、相対許容誤差と絶対許容誤差を制御できる。らしいです。
確かに、$Rtol$と$Atol$を小さくすることで$sc_i$を小さくできるので、誤差を小さくすることは可能です。
ただ、値の設定に関してちゃんとした物を発見できていないのでそのうち追記します。
$sc_i$を使用した$err$を元に刻み幅hを決定します。
$ err = \sqrt{\frac{1}{n}\displaystyle\sum_{i=1}^n({\frac{y_{1i}-\hat{y}_{1i}}{sc_i}})^2} $
RK45
C,A,Bに上記の記号$\bold{c}, \bold{a}, \bold{b}$が割り当てられています。Eは$\bold{\hat{b}}$に当たります。
こちらの値は以下の論文の値を参考にしていました。
Some Practical Runge-Kutta Formulas
...
=
=
=
=
...
刻み幅を指定する
刻み幅を指定する場合はt_evalを渡します。
例えば刻み幅0.01で計算を行いたい場合は以下のようになります。
(np.linspaceを使用していますが、np.arange(0.0, 40.01, 0.01)でも大丈夫です。)
=
実装を簡単に確認します。
(1) まずt_evalを指定することでnp.searchsortedを使用してt_evalからt_eval_stepとして抽出します。
...
= None
= # <- (1)
=
...
=
# <- (2)
=
(2) t_eval_stepとPを使用して補間sol(t_eval_step)*2が行われます。
これによりt_evalにおける軌道が計算されます。
(補間についてはそのうち調べます。)
参考文献
Solving Ordinary Differential Equations I
日本語訳も存在しますが、すでに販売を終了しており、図書館の貸し出し状態は不明だったのでこれを参考にしています。
II.1 THe First Runge-Kutta Methods
II.4 Practical Error Estimation and Step Size Selection
scipy.integrate.solve_ivp
scipy.integrate.solve_ivp | SciPy documentation
おまけ
OdeResult
scipy.solve_ivpの返り値であるOdeResultを確認します。
# scipy/integrate/_ivp/ivp.py
pass
# scipy/optimize/optimize.py
""" Represents the optimization result.
...
"""
return
=
=
= + 1
return
return +
return
sol(t_eval_step)
RkDenseOutput(...)(t_eval_step)は結局RkDenseOutput(...)._call_impl(t_eval_step)です。
# scipy/integrate/_ivp/rk.py
...
= # <-
...
=
return
...
# <- 補間処理部分
= /
=
=
=
=
= *
+=
+=
return
# scipy/integrate/_ivp/base.py
...
...
return # <- 結局ここ
...